- 介護ロボットの移乗支援は「誰に・どの型を・どう回すか」で決める
- まず整理|いまは「 9 分野 16 項目 」。このページは移乗支援だけに絞る
- 適応・禁忌の早見|「使いやすい利用者」と「先に見送るケース」
- 型で選ぶ|製品名より「どこを補助するか」で分ける
- 図で全体像を確認|導入判断 5 分フロー
- 導入・運用フロー|評価 → 設定 → 教育 → 記録 → 再評価
- 導入 KPI は最小で回す| 2 週間で「続ける価値」を判断する
- 配布物ダウンロード|移乗支援ロボット導入チェックシート
- 現場の詰まりどころ|宝の持ち腐れを防ぐ「手順化」
- よくある質問(FAQ)
- 次の一手|全体像をそろえる → 徒手移乗を見直す → 環境要因も点検する
- 参考文献
- 著者情報
介護ロボットの移乗支援は「誰に・どの型を・どう回すか」で決める
介護ロボットの移乗支援で最初に決めるべきなのは、「導入するかどうか」ではなくどの利用者・どの場面に・どの型を当てるかです。装着型と非装着型では狙いが違い、合う対象を外すと “怖くて誰も使わない機器” になりやすいです。
本記事は、PT / OT / ST と介護職が、移乗支援ロボットを現場で回せる形にするための実務整理です。答えるのは ①適応・禁忌 ②装着型 / 非装着型の使い分け ③ 2 週間パイロットの運用 KPI です。価格比較や加算の細目は扱わず、制度面は 生産性向上推進体制加算 I・II の違いと実務 に分けます。
まず整理|いまは「 9 分野 16 項目 」。このページは移乗支援だけに絞る
介護テクノロジー利用の重点分野は、現在は 9 分野 16 項目 で整理されています。このページで扱う中心は、移乗支援(装着)と移乗支援(非装着)です。つまり、介助者の身体負担を軽くしながら、ベッド・車いす・便器などの間の移乗を安全に回す機器に絞ります。
混同しやすいのが移動支援です。立ち上がりや屋内歩行まで含めて本人の移動を助ける機器は、制度上は別の項目として整理されています。非装着型の移乗支援は、つり下げ式移動用リフトを除く点も先に押さえておくと、導入判断がぶれにくくなります。
| 項目 | 主な狙い | 主な場面 | 本記事で扱うか |
|---|---|---|---|
| 移乗支援(装着) | 介助者のパワーアシスト | ベッド⇄車いす、便器への移乗介助 | 扱う |
| 移乗支援(非装着) | 介助者による移乗動作のアシスト | 移乗開始から終了までの支持・誘導・抱え上げ補助 | 扱う |
| 移動支援(屋内 / 装着) | 本人の立ち座り・歩行・方向転換の支援 | トイレ往復、屋内移動、立位保持 | 原則扱わない |
適応・禁忌の早見|「使いやすい利用者」と「先に見送るケース」
移乗支援ロボットが向くのは、反復量を増やしたいが、人力だけでは介助者負担や事故リスクが大きい場面です。逆に、座位・立位が崩れやすく、急変リスクが高いケースでは、ロボット導入より先に安全管理の型を整えた方が事故を減らせます。
迷いを減らすコツは、「意識・理解」「姿勢保持」「荷重の許容量」「急変リスク」の 4 軸で、まず “使えるか” を切ることです。ここが曖昧なまま導入すると、結局は誰も触らなくなります。
| 観点 | 使いやすい(候補) | 慎重(要条件) | 避けたい(原則) |
|---|---|---|---|
| 意識・理解 | 指示理解が概ね可能/協力的 | 注意がそれやすい/不安が強い(段階導入) | 強い抵抗・拒否/危険行動が目立つ |
| 姿勢保持 | 端座位〜立位の保持が短時間でも可能 | 体幹が不安定(支持・環境調整が必須) | 座位保持が困難/起立で崩れる |
| 荷重の許容量 | 下肢・体幹に一定の残存機能がある | 疼痛・拘縮・骨粗鬆が強い(負荷設定が鍵) | 荷重変化が高リスク(不安定骨折等) |
| 急変リスク | 循環・呼吸が安定し、離床が進んでいる | 心不全・呼吸不全など(後半フェーズで限定) | 短時間立位でも危険徴候が出やすい |
型で選ぶ|製品名より「どこを補助するか」で分ける
移乗支援ロボットは、製品名を覚えるよりどこを補助する型なのかで整理した方が、導入後のミスマッチを減らせます。選定の軸は、介助者負担を減らしたいのか、起立の崩れを減らしたいのか、離床〜移乗の流れを一体で回したいのかです。
現場で止まりやすいのは、機器そのものより置き場・高さ・担当・使用条件が固定されていないケースです。導入判断は、型と同時に導線まで設計する前提で進めます。
| 型 | 主な狙い | 向くシーン | 詰まりやすい点 | 最初の対策 |
|---|---|---|---|---|
| 装着型(介助者補助) | 介助者の腰部負担を減らす | 反復移乗が多い現場 | 装着の手間で稼働率が落ちる | 置き場固定+装着手順 1 枚化 |
| 非装着型(前面支持・起立補助) | 立ち上がりの崩れを減らす | 立位へ移る瞬間が不安定 | 位置ズレで怖くて使われない | 配置・高さ・足位置を標準化する |
| 非装着型(離床・移乗一体型) | 離床〜移乗の流れを作る | ベッド上で過ごす時間が長く、離床量を増やしたい | ベッド高や周辺環境で再現できない | 環境条件を 1 行で固定する |
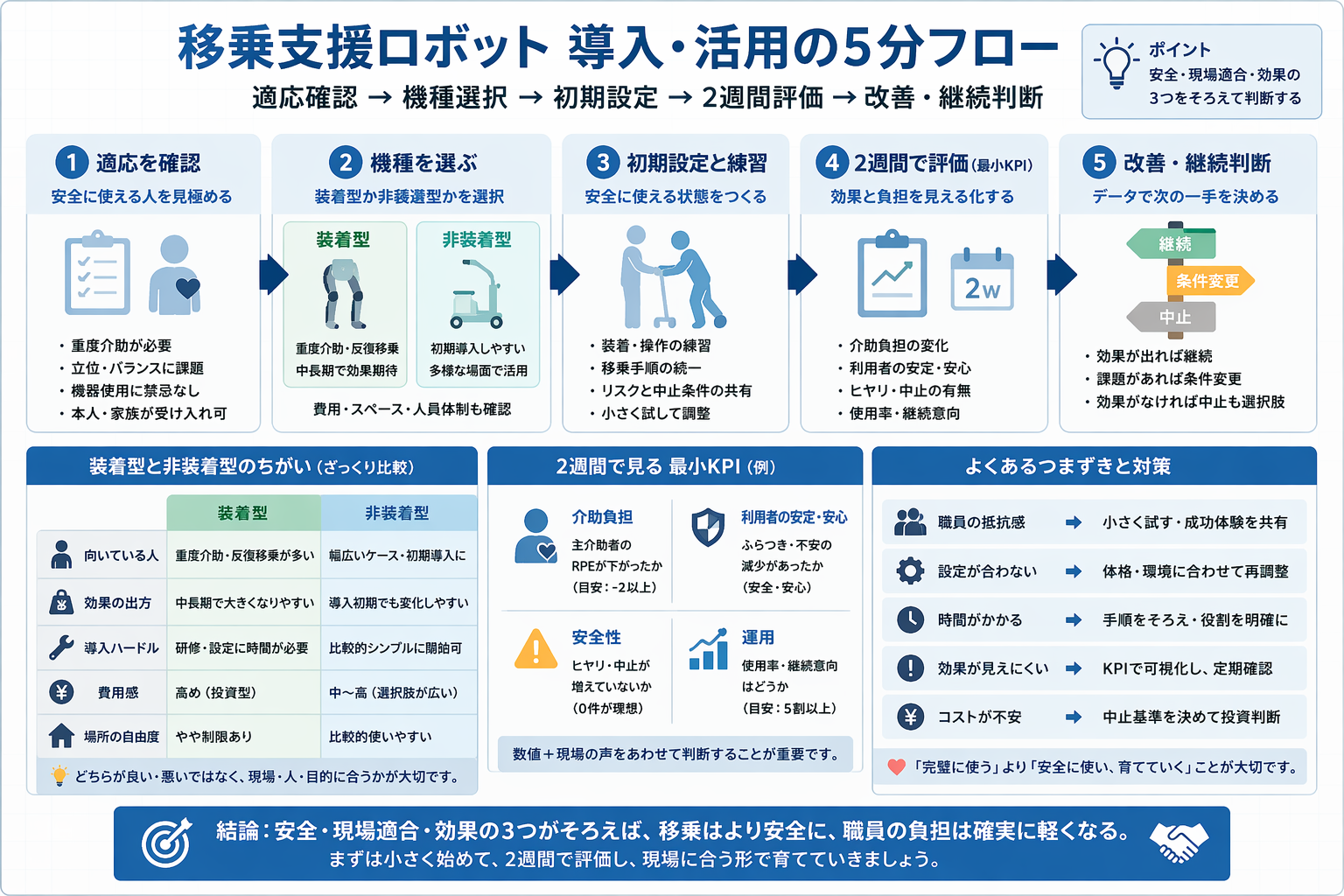
図で全体像を確認|導入判断 5 分フロー
文章を読む前に流れを 1 枚で整理したい方は、下の図版から全体像を確認してください。適応確認 → 型の選択 → 初期設定 → 2 週間評価 → 継続 / 条件変更 / 中止の順で見ると、現場で迷いにくくなります。
導入・運用フロー|評価 → 設定 → 教育 → 記録 → 再評価
導入後に失敗が増えるのは、購入で終わって運用の型が無いときです。最初に固定すべきは、対象者選定、初期設定、教育(誰が教えるか)、記録(どこに残すか)の 4 点です。
おすすめは、対象 3 名・責任者 1 名・ 2 週間のパイロットです。いきなり全員に広げるより、成功条件をそろえて小さく回した方が “触れる人” が増えます。
| ステップ | やること(最小) | 残す 1 行 | よくある詰まり |
|---|---|---|---|
| 評価 | 起立・移乗の可否+介助者負担をセットで確認 | 対象・介助量・反復数 | 利用者側だけ見て、導入根拠が弱い |
| 設定 | 補助量は “安全を担保しつつ自力成分を残す” | 補助量(強 / 中 / 弱) | 強すぎて “運ばれるだけ” になる |
| 教育 | 責任者を固定し、禁忌・中止基準を共有 | 担当・使用条件 | 怖くて誰も触らない |
| 記録 | 最小 KPI を “ 1 日 1 行 ” で回す | 稼働率・安全・効果 | 様式が無く、効果が見えない |
| 再評価 | 2 週間で継続 / 条件変更 / 中止を決める | 結論と次の一手 | だらだら継続して物置化する |
導入 KPI は最小で回す| 2 週間で「続ける価値」を判断する
KPI は、多すぎると書かれません。まずは稼働率、反復数、介助者 Borg、安全(ヒヤリ・中止)の 4 つに絞ります。これだけで「使われたか」「安全か」「介助負担が軽くなったか」が見えます。
介助量の表現は院内でぶれやすいので、本記事では見守り / 軽介助 / 中等度介助 / 全介助の 4 段階に統一します。ログでも同じ語彙を使うと、再評価がしやすくなります。
| KPI | 記録( 1 日 1 行 ) | 2 週間の判定 | 改善の方向 |
|---|---|---|---|
| 稼働率 | 使用(○ / ×) | × が続くなら運用設計の問題 | 置き場・担当・使用条件を固定 |
| 反復数 | 回数(起立 / 移乗) | 増えないなら目的か設定がズレ | 補助量を見直し “自力成分” を残す |
| 介助者 Borg | 0 – 10(介助後 1 回) | 下がらないなら介助姿勢か型がズレ | 立ち位置・環境・型選択を調整 |
| 安全 | ヒヤリ / 中止理由 | 増えるなら即 “条件変更” | 禁忌・中止基準、配置、教育を優先 |
| 日付 | 対象 | 使用(○ / ×) | 反復数 | 介助量 | Borg / 安全 |
|---|---|---|---|---|---|
| ____ / ____ | ____ | ○ / × | ____ 回 | 見守り / 軽介助 / 中等度介助 / 全介助 | Borg ____ / ヒヤリ:なし・あり(________) |
| ____ / ____ | ____ | ○ / × | ____ 回 | 見守り / 軽介助 / 中等度介助 / 全介助 | Borg ____ / ヒヤリ:なし・あり(________) |
配布物ダウンロード|移乗支援ロボット導入チェックシート
2 週間パイロットを現場で回しやすいように、適応確認 → 初期設定 → 最小 KPI → 2 週間判定を 1 枚で書ける配布物を用意しました。印刷して使いたい方は、下のボタンから開けます。
プレビューを開く
現場の詰まりどころ|宝の持ち腐れを防ぐ「手順化」
導入後に多い失敗は、「良さそうだから買ったが、数か月で使われなくなる」ことです。原因は、機器の性能よりも運用(ルール・教育・記録)の未整備であることがほとんどです。
このパートでは、“止まる理由” を先に潰します。まずは下の 3 本から入り、失敗パターンを減らしてください。
→ よくある失敗(導入が止まる理由)
→ 回避の手順(最小チェック表)
関連:腰を守るボディメカニクス(腰痛予防の基本)
よくある失敗|「誰も使わない」「怖くて触れない」「効果が見えない」
失敗の典型は 3 つです。① 担当と使用条件が曖昧、② 禁忌・中止基準が共有されず怖くて使えない、③ 記録様式に組み込まれず効果が見えない、の流れです。結果として “物置化” が起きます。
対策は、責任者固定、手順 1 枚化、最小 KPI( 1 日 1 行 )をセットで作ることです。最初から全員に広げず、まずは 3 名・ 2 週間 で成功体験を作ると、現場の抵抗感を下げやすくなります。
回避の手順|最小チェック(導入前〜運用 2 週間)
チェックは “細かさ” より “順番” が大事です。導入前に可否を切り、設定は安全側から入りつつ自力成分を残し、教育は責任者固定で回します。記録は 4 KPI に絞り、 2 週間で継続判断を出します。
| フェーズ | チェック項目(□) | OK の目安 | NG のときの最初の一手 |
|---|---|---|---|
| 導入前(可否) |
□ 指示理解・協力が得られる □ 端座位〜立位が短時間でも成立する □ 荷重変化に高リスクがない □ 急変リスクが高くない(危険徴候が出にくい) |
“まず使える” かを 4 軸で判定できる | 対象を絞る / 条件(支持・環境)を追加して段階導入 |
| 導入前(運用) |
□ 置き場が決まっている(すぐ出せる) □ 責任者(トレーナー)が決まっている □ 使用条件(いつ・誰に・どこで)が 1 行で書ける □ 禁忌・中止基準が共有されている |
“誰が使うか” が曖昧でない | 責任者固定 → 使用条件 1 行化 → 禁忌・中止基準の掲示 |
| 開始 1 〜 3 日 |
□ 初期設定(補助量)が記録されている(強 / 中 / 弱) □ 介助者の立ち位置・環境条件(高さ等)が固定できた □ 1 日 1 行ログが書けている( 5 分以内) |
“怖い” が減り、触れる人が増える | 配置・高さの標準化 / 手順 1 枚化(写真 1 枚でも可) |
| 2 週間判定 |
□ 稼働率:○ が続いている □ 反復数:増えている(または安定して確保できる) □ Borg:下がる(または悪化しない) □ 安全:ヒヤリが増えていない |
継続する価値が “数字” で説明できる | 低稼働なら運用修正 / 安全 NG なら条件変更 / 効果薄なら型の見直し |
ここまで整えても毎回同じところで詰まる場合は、書き方や手順だけでなく、教育体制・共通フォーマット・相談相手の有無など、職場環境の影響を受けている可能性もあります。評価・記録・報告の「型」をまとめて整理したい方は、PT キャリアガイドも参考になります。
よくある質問(FAQ)
各項目名をタップ(クリック)すると回答が開きます。もう一度タップで閉じます。
移乗支援ロボットの効果は、何を見れば判断できますか?
まずは 稼働率、反復数、介助者 Borg、安全(ヒヤリ・中止)の 4 つで十分です。効果を “何となく楽” で終わらせず、 2 週間で比較できる形にすると、継続 / 条件変更 / 中止を決めやすくなります。
移乗支援ロボットが使いにくい、または禁忌になりやすいのはどんなケースですか?
座位保持が困難で崩れやすい、指示理解が難しく危険行動がある、急変リスクが高く短時間立位でも危険徴候が出やすい、などは見送りやすいです。迷うときは「意識・理解」「姿勢保持」「荷重許容」「急変リスク」の 4 軸で “まず可否” を切ります。
装着型と非装着型は、どう使い分ければよいですか?
介助者の腰部負担を減らしたいなら装着型、立ち上がりや移乗の崩れを減らしたいなら非装着型、離床から移乗までの流れを一体で作りたいなら離床・移乗一体型の非装着型が考えやすいです。製品名より “どこを補助したいか” で選ぶ方が失敗しにくいです。
導入が失敗する理由は何ですか?
多いのは、① 担当と使用条件が決まっていない、② 禁忌・中止基準が共有されず怖くて使えない、③ 記録が無く効果が見えない、の 3 点です。対策は「責任者固定」「手順 1 枚化」「最小 KPI( 1 日 1 行ログ )」を最初に作ることです。
次の一手|全体像をそろえる → 徒手移乗を見直す → 環境要因も点検する
移乗支援ロボットの効果を出す近道は、機器の比較より先に「誰が、いつ、どの条件で、どう記録するか」をそろえることです。まずは同ジャンルのページで “型” を固め、そのうえで現場の詰まりが環境由来かどうかも点検します。
- 全体像をそろえる:介助技術ハブ
- 徒手移乗を見直す:ベッド⇄車椅子の移乗介助:動作分析と介助のコツ
教育体制・人員・記録文化など “環境要因” が詰まりの中心にあるときは、職場の見直しも並行した方が改善が早いことがあります。
参考文献
- 厚生労働省. 「介護テクノロジー利用の重点分野」について. https://www.mhlw.go.jp/stf/seisakunitsuite/bunya/0000209634_00013.html
- 経済産業省. 介護テクノロジー利用の重点分野の定義(移乗支援(装着) / 移乗支援(非装着)). 2024. PDF
- 厚生労働省. 介護ロボットの効果的な活用のための導入・活用のポイント. PDF
- Nguyen NC, Saito M. Issues in applications of nursing care robots, and in the training of care workers in their use in Japan. Front Med. 2025;12:1459015. doi: 10.3389/fmed.2025.1459015
- Nakamura K, Saga N. Current status and consideration of support/care robots for stand-up motion. Appl Sci. 2021;11(4):1711. doi: 10.3390/app11041711
- Miura K, Kadone H, Abe T, et al. Successful Use of the Hybrid Assistive Limb for Care Support to Reduce Lumbar Load in a Simulated Patient Transfer. Asian Spine J. 2021;15(1):40-45. doi: 10.31616/asj.2019.0111
- Kato K, Yoshimi T, Aimoto K, Sato K, Itoh N, Kondo I. Reduction of multiple-caregiver assistance through the long-term use of a transfer support robot in a nursing facility. Assist Technol. 2023;35(3):271-278. doi: 10.1080/10400435.2022.2039324
- Kato K, Yoshimi T, Aimoto K, et al. A rise-assisting robot extends life space and improves facial expressions of nursing home residents. BMC Health Serv Res. 2022;22(1):1588. doi: 10.1186/s12913-022-08952-w
- Kato K, Yoshimi T, Tsuchimoto S, Mizuguchi N, Aimoto K, Itoh N, Kondo I. Identification of care tasks for the use of wearable transfer support robots: an observational study at nursing facilities using robots on a daily basis. BMC Health Serv Res. 2021;21(1):652. doi: 10.1186/s12913-021-06639-2
著者情報

rehabilikun(理学療法士)
rehabilikun blog を 2022 年 4 月に開設。医療機関/介護福祉施設/訪問リハの現場経験に基づき、臨床に役立つ評価・プロトコルを発信。脳卒中・褥瘡などで講師登壇経験あり。
- 脳卒中 認定理学療法士
- 褥瘡・創傷ケア 認定理学療法士
- 登録理学療法士
- 3 学会合同呼吸療法認定士
- 福祉住環境コーディネーター 2 級
専門領域:脳卒中、褥瘡・創傷、呼吸リハ、栄養(リハ栄養)、シーティング、摂食・嚥下