脳卒中リハのテクノロジー活用|VR・歩行ロボット・刺激・テレリハの使い分け
脳卒中リハで VR・歩行ロボット・ニューロモデュレーション・テレリハを使うときは、機器名から選ぶのではなく、目的・反復量・安全・生活への橋渡しで整理すると判断がぶれにくくなります。この記事では、各技術の細かな手順ではなく、「どの患者に、何を増やすために、どこまで使うか」を決める総論として整理します。
このページで答えるのは、脳卒中リハのテクノロジーを現場で選ぶための判断軸です。VR の細かな設定、歩行ロボットの詳細プロトコル、上肢刺激の禁忌一覧は子記事に譲り、本記事では最初の選定と運用の型に絞ります。
まず 5 分で決める|目的・量・安全・橋渡しで選ぶ
最初に決めるのは「どの機器を使うか」ではなく、何を増やしたいかです。上肢の使用量、歩行反復、バランス練習、在宅練習の継続など、狙いを 1 つに絞ると選定しやすくなります。
- 目的を決める:上肢操作、歩行量、バランス、ADL、在宅継続のどれを優先するか
- 反復量の壁を探す:介助量、疲労、注意低下、痛み、人手不足、通院負担
- 安全を先に決める:転倒、循環変動、疼痛、VR酔い、刺激の禁忌を確認する
- 生活へ橋渡しする:機器内の改善を、病棟歩行・更衣・家事・在宅練習へつなぐ
- 同条件で再評価する:回数、成功率、代償、中断理由を短く記録する
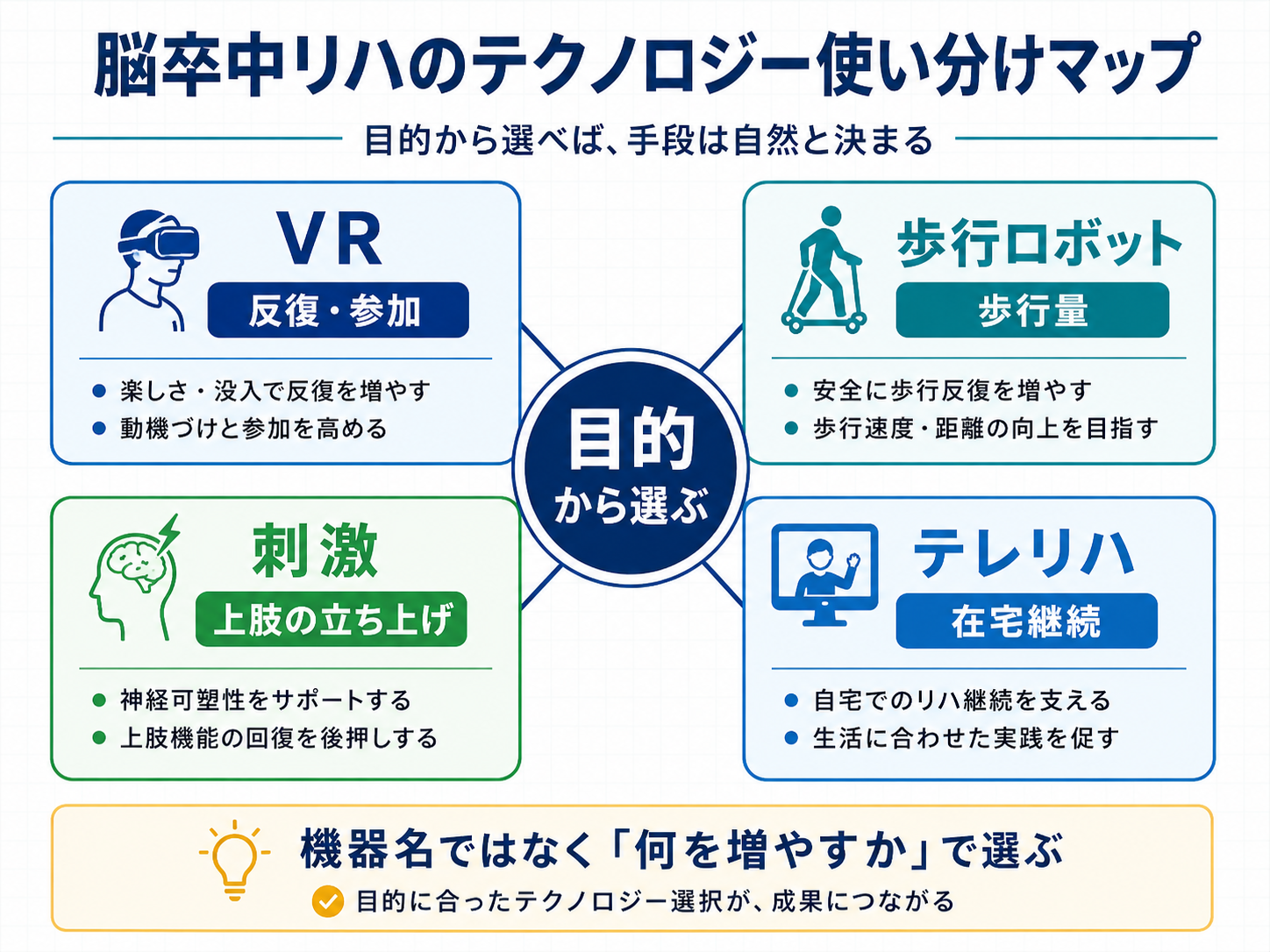
使い分け早見|4 手段は「何を増やすか」で分ける
VR・歩行ロボット・ニューロモデュレーション・テレリハは、同じ「新しい技術」でも役割が異なります。下の図版と表では、現場で迷いやすい目的・強み・注意点に絞って整理します。
| 手段 | 向いている場面 | 増やせるもの | 止まりどころ | 次に読む記事 |
|---|---|---|---|---|
| VR | 上肢・バランス・歩行課題の反復を楽しく続けたい | 反復回数、フィードバック、参加意欲 | 酔い、ふらつき、代償動作の増加 | VR リハビリの安全と処方 |
| 歩行ロボット | 介助量が多く、歩行反復が不足している | 歩行量、練習条件の標準化 | 機器内の歩行で終わり、生活歩行へつながらない | ロボット歩行訓練の適応と運用 |
| ニューロモデュレーション | 上肢の随意運動を引き出し、課題練習につなげたい | 反復練習の効率、運動学習の入り口 | 刺激単独で終わる、禁忌確認が曖昧 | 上肢×ニューロモデュレーション |
| テレリハ | 退院後・在宅で練習と確認を続けたい | 継続、自己管理、生活場面での練習 | 見守り、安全確認、記録の不足 | 在宅×脳卒中の運用記事へ展開予定 |
選び方のコツ|反復を止めている原因から逆算する
臨床では、機器の性能よりも「反復を止めている原因」を見つける方が重要です。原因が介助量なら歩行ロボット、継続性なら VR、随意運動の立ち上がりなら刺激併用、退院後の継続ならテレリハが候補になります。
- 介助量が多い:歩行ロボットで歩行量を確保し、通常リハで病棟歩行へ橋渡しする
- 飽きや注意低下がある:VR で課題反復を続けやすくする
- 上肢の随意運動が乏しい:刺激を課題練習の前処置または併用として考える
- 退院後に練習が途切れる:テレリハで在宅練習・記録・確認を固定する
評価と介入の全体像は、脳卒中ハブで先に整理しておくと、機器選定が「流行」ではなく「目的に合った手段」として説明しやすくなります。
運用の型|準備・反復・再評価を全手段で共通化する
技術が違っても、セッションの型は共通化できます。今日のねらいを 1 つに絞り、反復の数と質を残し、最後に同条件で短く再評価します。これにより、担当者が変わっても次回設定を引き継ぎやすくなります。
| 段階 | やること | 確認すること | 記録例 |
|---|---|---|---|
| 準備 | 目的を 1 つ決め、安全確認を行う | 疲労、疼痛、循環、転倒リスク、禁忌 | 本日は歩行反復量の確保を目的に実施 |
| 反復 | 成功しやすい難度から開始し、段階的に調整する | 回数、成功率、代償、ふらつき | 後半に体幹代償あり。休息で再開可能 |
| 橋渡し | 機器後に通常課題を 1 つ入れる | 病棟歩行、更衣、リーチ、方向転換など | ロボット後に病棟内歩行を短距離で確認 |
| 再評価 | 同条件で短く確認し、次回設定を決める | 上げる、維持する、下げる、中止する | 次回は難度を維持し、方向転換課題を追加 |
現場の詰まりどころ|機器導入より運用設計で差が出る
現場で止まりやすいのは、機器の有無よりも目的の曖昧さ、安全設計の不足、記録のばらつきです。ここを整えないまま導入すると、実施回数は増えても生活場面への変化が見えにくくなります。
・よくある失敗へ
・回避手順へ
・関連:脳卒中治療ガイドライン 2025 改訂ポイント
よくある失敗
- 機器が目的化する:「何を伸ばすか」が曖昧なまま実施してしまう
- 反復が記録されない:回数・成功率・代償・中断理由が残らない
- 橋渡しがない:機器内の改善が ADL や生活歩行に接続されない
回避手順
- 目的を 1 文で書く:例「歩行反復量を増やし、病棟内移動へつなげる」
- 止める条件を先に決める:酔い、疼痛、ふらつき、不安、循環変動、禁忌疑い
- 機器後の通常課題を 1 つ置く:病棟歩行、方向転換、更衣、在宅練習など
評価・記録・報告の型で毎回つまずく場合は、手順だけでなく学べる環境も点検しておくと整理しやすくなります。
PT キャリアガイドを見る記録の型|目的・反復・安全・橋渡しを 1 行で残す
テクノロジー活用では、実施した機器名だけでなく、何を狙い、どれだけ反復し、どこで止め、何へ橋渡ししたかを残すとチームで共有しやすくなります。記録は長く書くより、判断が伝わる順番にそろえることが重要です。
| 項目 | 書く内容 | 記録例 |
|---|---|---|
| 目的 | 何を増やすために使ったか | 歩行反復量の確保を目的に歩行ロボットを使用 |
| 反復 | 回数・時間・成功率・代償 | 後半に体幹代償あり。休息で再開可能 |
| 安全 | 中止理由や注意点 | 疼痛増悪なし。ふらつき軽度のため見守り継続 |
| 橋渡し | 通常リハ・ADL・在宅練習へどうつなげたか | 実施後に病棟内歩行を短距離で確認 |
| 次回 | 難度を上げる・維持する・下げる | 次回は難度維持し、方向転換課題を追加 |
子記事の使いどころ|目的別に最短で進む
本記事で選定の方向性が決まったら、詳細は子記事で確認します。各論では、適応、安全確認、処方テンプレ、よくある失敗を深掘りします。
- VR:安全と処方を固定したい → VR リハビリと通常リハの違い
- 歩行ロボット:歩行量を増やして自立へ寄せたい → ロボット歩行訓練
- 上肢×刺激:随意運動の立ち上げと課題反復を組みたい → 上肢×ニューロモデュレーション
よくある質問(FAQ)
各項目名をタップ(クリック)すると回答が開きます。もう一度タップで閉じます。
Q1. 最初に検討するなら、どの技術がよいですか?
最初に決めるのは技術名ではなく、反復を止めている原因です。歩行反復が介助量で止まるなら歩行ロボット、継続性が課題なら VR、上肢の随意運動を引き出したいなら刺激併用、退院後の継続が課題ならテレリハを候補にします。
Q2. VR は高齢の脳卒中患者にも使えますか?
使える場合があります。開始時は短時間・低難度・座位または見守り下から始め、酔い、ふらつき、頭痛、頸部痛、不安の増強があれば中断します。楽しさだけでなく、代償動作が増えていないかも確認します。
Q3. 歩行ロボットを生活歩行につなげるには?
ロボット内で歩いて終わらせず、同じ日に病棟歩行、方向転換、立ち上がり、トイレ動作などの通常課題へ橋渡しします。機器で反復量を確保し、通常リハで生活場面に近づける流れが重要です。
Q4. tDCS や rTMS は刺激だけで効果を狙えますか?
刺激単独ではなく、課題練習と組み合わせて考えます。刺激は反復練習の入り口や効率を支える補助手段として位置づけ、禁忌確認、実施前後の課題練習、短い再評価をセットにします。
Q5. テレリハは何から始めるとよいですか?
最初は在宅練習の内容、実施回数、困った場面、転倒や痛みの有無を記録するところから始めると運用しやすくなります。安全確認と見守り方法を先に決め、無理に複雑なシステムから始めないことが大切です。
次の一手|全体像から各論へ進む
- 全体像を整理する:脳卒中ハブ
- 実務テンプレに落とす:脳卒中治療ガイドライン 2025 改訂ポイント
- 歩行量の設計へ進む:ロボット歩行訓練の適応と運用
参考文献
- Laver KE, Lange B, George S, et al. Virtual reality for stroke rehabilitation. Cochrane Database Syst Rev. 2025;6(6):CD008349. DOI: 10.1002/14651858.CD008349.pub5 / PubMed: 40537150
- Mehrholz J, Kugler J, Pohl M, Elsner B. Electromechanical-assisted training for walking after stroke. Cochrane Database Syst Rev. 2025;5(5):CD006185. DOI: 10.1002/14651858.CD006185.pub6 / PubMed: 40365867
- Laver KE, Adey-Wakeling Z, Crotty M, Lannin NA, George S, Sherrington C. Telerehabilitation services for stroke. Cochrane Database Syst Rev. 2020;1(3):CD010255. DOI: 10.1002/14651858.CD010255.pub3 / PubMed: 32002991
著者情報

rehabilikun(理学療法士)
rehabilikun blog を 2022 年 4 月に開設。医療機関/介護福祉施設/訪問リハの現場経験に基づき、臨床に役立つ評価・プロトコルを発信。脳卒中・褥瘡などで講師登壇経験あり。
- 脳卒中 認定理学療法士
- 褥瘡・創傷ケア 認定理学療法士
- 登録理学療法士
- 3 学会合同呼吸療法認定士
- 福祉住環境コーディネーター 2 級
専門領域:脳卒中、褥瘡・創傷、呼吸リハ、栄養(リハ栄養)、シーティング、摂食・嚥下